
Der kürzlich bei Goudsmit Magnetics in Betrieb genommene Roboter vereinfacht den Produktionsprozess von Magnetbaugruppen. Derartige Magnete werden unter anderem in der Automobil-, High-Tech-, Luftfahrt- und Medizinindustrie eingesetzt. Außerdem führt das LEAN-Verfahren, das Goudsmit ebenfalls einsetzt, zu einer höheren Gesamtsicherheit der Magnetbaugruppe und verhindert Verschwendung.
Höhere Effizienz
Das bedeutet eine höhere Effizienz und weniger Ausfall. Der Roboter überwindet auch alle Probleme, auf die ein Hersteller beim Zusammenbau eines Magnetsystems stößt, beispielsweise das Verkleben von magnetisierten Teilen, die dazu neigen, aneinanderzuhaften. Ein weiterer Vorteil besteht darin, dass Goudsmit bereits in einem frühen Prozessstadium über das am besten geeignete Produktionsverfahren für das jeweilige Magnetsystem mitdenken und mit Hilfe von 3D-Magnetberechnungen und Rapid Prototyping sofort testen kann.
RobofrOK
Der Produktionsprozess, beispielsweise für Magnetbaugruppen, ist in Schritte unterteilt, von denen jeder seine eigenen Qualitätsanforderungen erfüllen und zu 100 % den Spezifikationen entsprechen muss. Das zeigt sich auch in der Prozessbenennung: RobofrOK, mit einem Roboterfrosch als Symbol, steht für „First Run Okay“, etwas, das zum Beispiel in der Automobilindustrie sehr wichtig ist. Hier wird ein Ausschuss von 0-PPM (0 parts per million) angestrebt. Sehen Sie in diesem Video, wie es funktioniert.
Zertifiziert
Zu den mit dem RobofrOK-Verfahren konstruierten Baugruppen gehören Magnetgreifer, Magnetspulen, geklebte Magnetsegmente oder Sandwich-Systeme für den High-Tech- und den Automobilmarkt. Für Magnetkomponenten verfügt Goudsmit über Zertifizierungen nach ISO 9001:2008, ISO/TS 16949:2009 und AS 9100C. Darüber hinaus ist das Unternehmen bestrebt, diese Zertifizierungen auch für die Produktionsumgebung zu erreichen. Auch dies ist für die genannten Industrien wichtig.
Verfahren
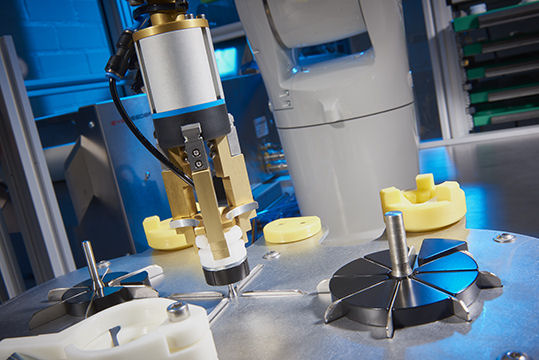
Ein Stellantrieb ist ein gutes Beispiel für eine Magnetbaugruppe, die ein Hersteller selbst zusammenbauen kann, was ein Roboter jedoch effizienter und besser kann. Ein Stellantrieb kann aus einer Reihe von Neodym-Magnetsegmenten (Nd-Fe-B) bestehen, die auf eine Welle geklebt werden müssen.
Magnetsegment positionieren
Dies ist von Hand möglich, aber da der Hersteller die Magnete immer im magnetisierten Zustand angeliefert bekommt, muss er diese zunächst trennen. Anschließend muss jedes Magnetsegment auf eine Welle gesetzt und in Position gehalten werden, bis der Kleber ausgehärtet ist. Danach muss der nächste Magnet geklebt werden. Dies ist ein sehr arbeitsintensiver Prozess und jeder weitere Magnet bekommt einen größeren Widerstand. Je mehr Magnete, desto stärker wird das Gesamtpaket.
Magnetisierung
Goudsmit verarbeitet zuerst die Magnete und die Magnetisierung erfolgt anschließend im Prozess. Ein Förderband führt die Segmente zu und der Roboter nimmt sie vom Band. Anschließend wird das Magnetsegment an einer Kamera entlanggeführt, um zu prüfen, ob keine Brüche oder Risse erkennbar sind, und wird weiter zur Magnetisierungsspule geleitet. Danach legt der Roboter die Segmente einzeln in die Werkzeugeinheit, wo sie zusammengesetzt und verklebt werden. Der Roboter ist nicht an ein bestimmtes Magnetformat gebunden und dadurch flexibel.
Mehr Informationen? Bitte benutzen Sie das Kontaktformular